
Robust Pedestrian Awareness using Dynamic-Map based Architecture (Funded by Hyundai-Kia)
Sponsored by: Hyundai-Kia America
Technical Center Inc. (HATCI)
Connected and Autonomous Vehicles (CAV) rely on information obtained from sensors and communication to make decisions. In a Cooperative Vehicle Safety (CVS) system, information from remote vehicles (RV) is available at the host vehicle (HV) through the wireless network. Safety applications such as crash warning algorithms use this information to estimate the RV and HV states. However, this information is uncertain and sparse due to communication losses, limitations of communication protocols in high congestion scenarios, and perception errors caused by sensor limitations. In this project we proposed a novel architecture that divide the application and information/perception subsystems. This architecture is enabled by a Dynamic Object Map (DOM) middle layer which uses the received data from HV local sensors and integrates it with the data received through wireless communication to track RVs and create a real-time dynamic map of HV’s surrounding.
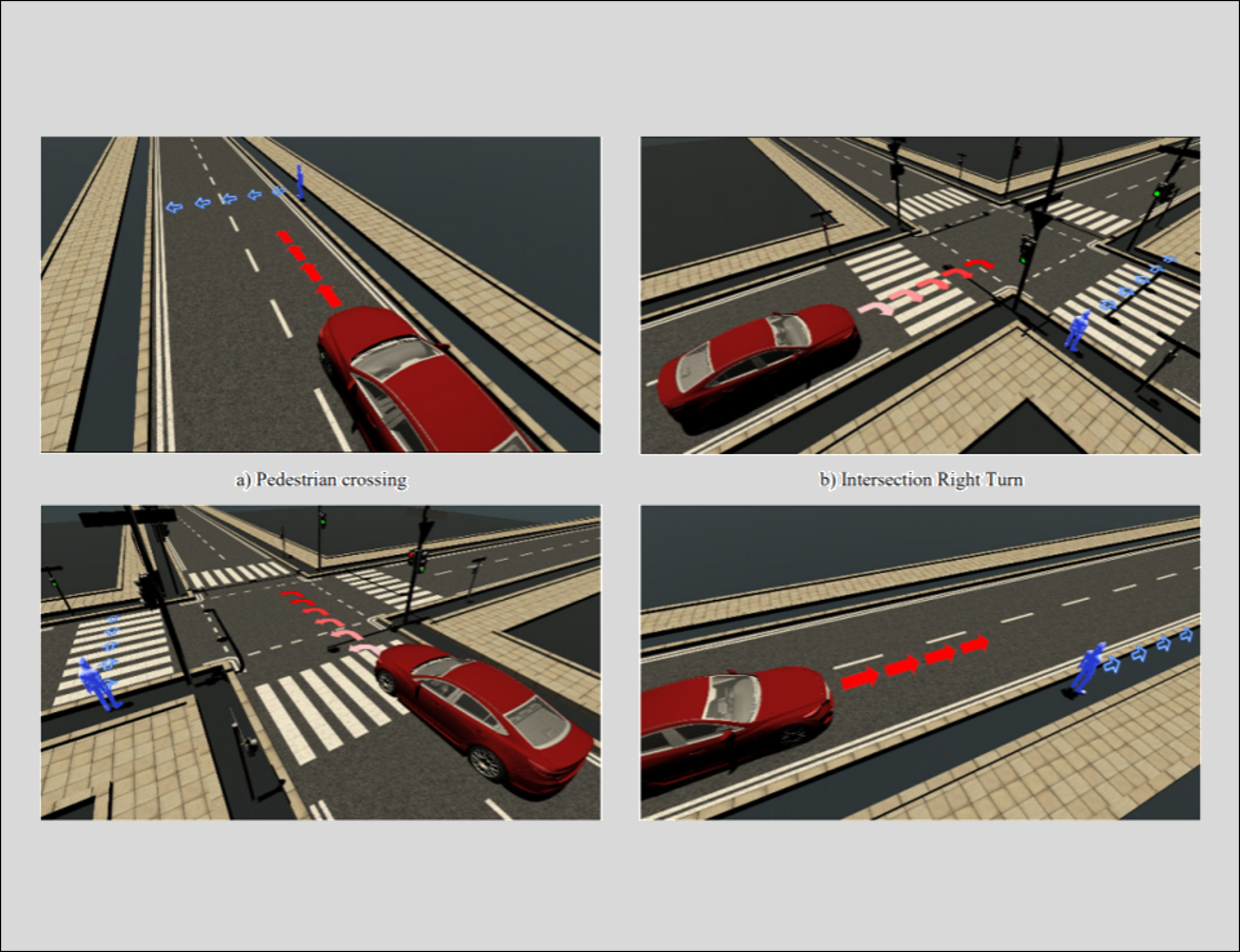
In order to validate the usability of our proposal, we utilize the DOM architecture to facilitate pedestrian awareness. Deep-learning based computer vision algorithm active on the detection, coupled with seamless V2X communication enhances the close-proximity pedestrian awareness of the vehicles. The processing pipeline does not require any network-level acknowledgement from the pedestrian, thus improving the reliability of the CVS.
This is an improvement over our previous work on pedestrian detection using Vehicle-to-Pedestrian (V2P) communication where DSRC equipped mobile phone was required on the pedestrian end for precise detection. Read more about it here.
-
Key Features & Highlights:
Connected and Autonomous Vehicles, Cooperative Vehicle Safety Systems, Dynamic Object Map.
· Flexibility and Scalability to accommodate sensor fusion data
· Robustness
· Modular design
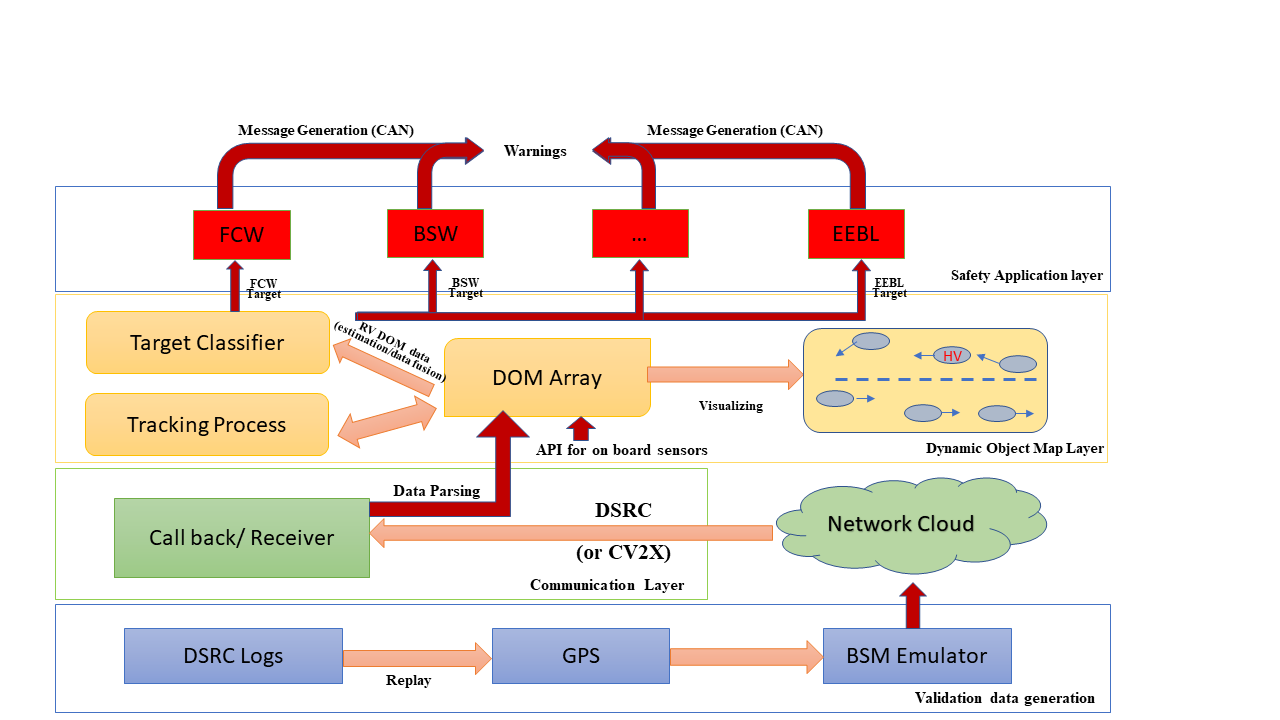
High level view of the DOM-based Architecture (From bottom to top: Communication module end to Safety alert generation end)
Current Projects
Updated on July 2019
Related Posts

