
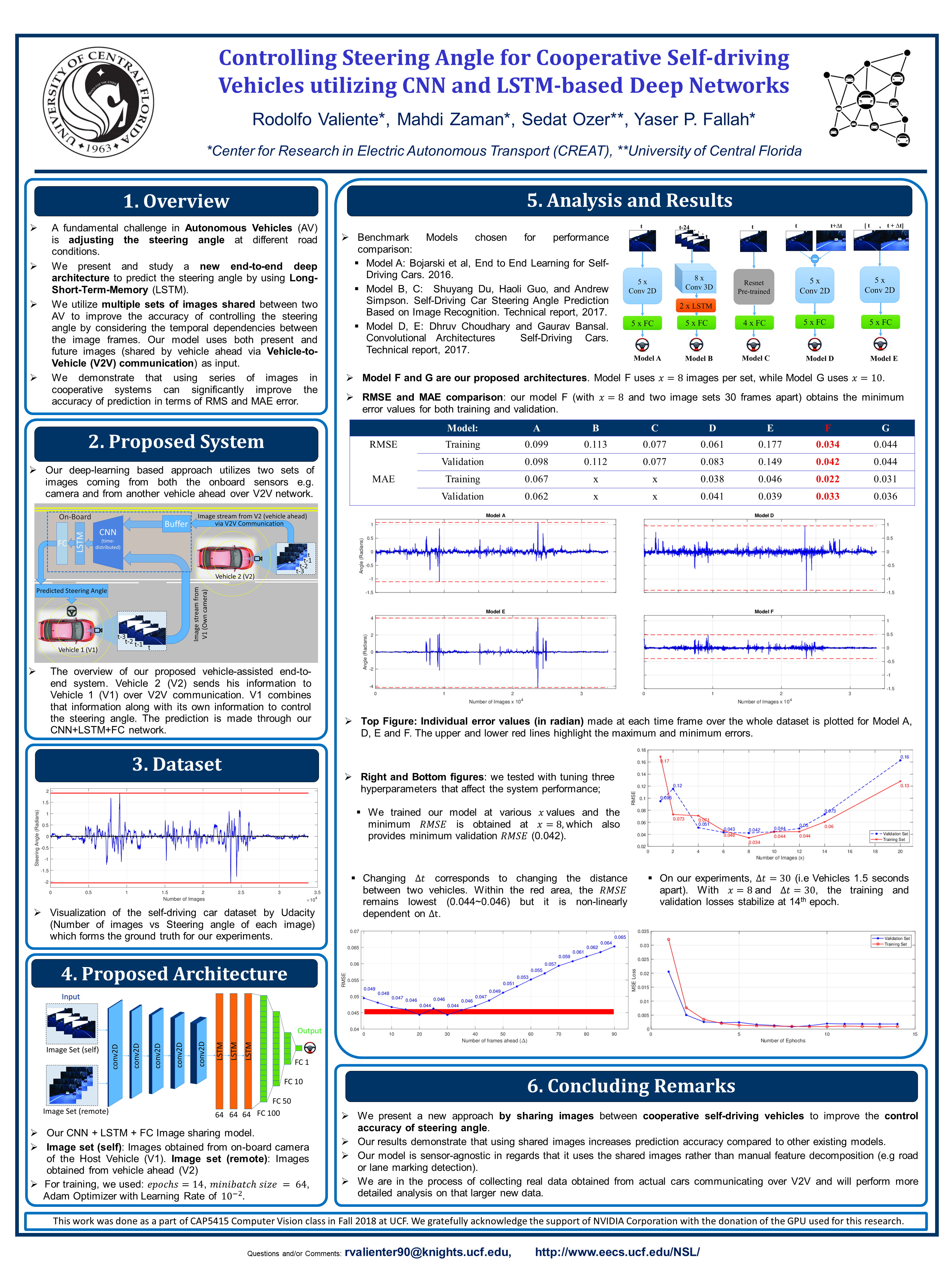
Controlling Steering Angle for Cooperative Self-driving Vehicles utilizing CNN and LSTM-based Deep Networks
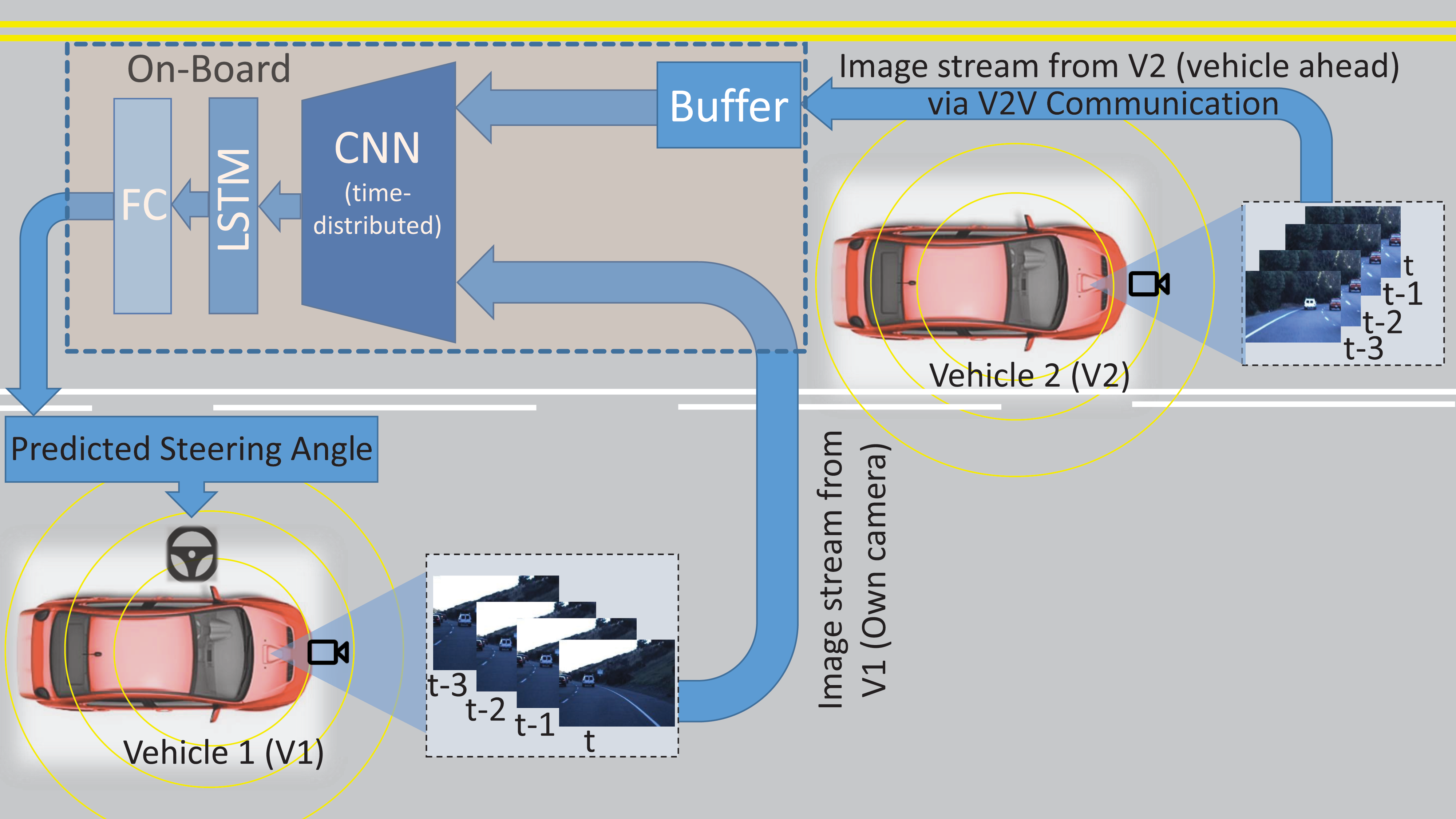
A fundamental challenge in autonomous vehicles is adjusting the steering angle at different road conditions. Recent state-of-the-art solutions addressing this challenge include deep learning techniques as they provide end-to-end solution to predict steering angles directly from the raw input images with higher accuracy. Most of these works ignore the temporal dependencies between the image frames. In this paper, we tackle the problem of utilizing multiple sets of images shared between two autonomous vehicles to improve the accuracy of controlling the steering angle by considering the temporal dependencies between the image frames. This problem has not been studied in the literature widely. We present and study a new deep architecture to predict the steering angle automatically by using Long-Short-Term-Memory (LSTM) in our deep architecture. Our deep architecture is an end-to-end network that utilizes CNN, LSTM and fully connected (FC) layers and it uses both present and futures images (shared by a vehicle ahead via Vehicle-to-Vehicle (V2V) communication) as input to control the steering angle. Our model demonstrates the lowest error when compared to the other existing approaches in the literature.
Related Posts

